Un equipo de ingenieros chinos de la Northwestern Polytechnical University ha desarrollado y probado con éxito el RoboFalcon2.0, un robot inspirado en un halcón capaz de despegar desde el suelo con su propia energía, sin necesidad de sistemas de lanzamiento externos. El avance ha sido publicado en la revista Science Advances, marcando un hito en el campo de la robótica aérea.
Inspiración biológica y mecánica innovadora
El gran logro del RoboFalcon2.0 reside en su capacidad para replicar el complejo movimiento alar FSF (Flapping, Sweeping, Folding), utilizado por aves y murciélagos en despegues y vuelos a baja velocidad. Este patrón combina potentes aletazos descendentes con movimientos ascendentes aerodinámicamente inactivos.
Para conseguirlo, el equipo diseñó un mecanismo de balancín cónico, capaz de trasladar la potencia de un único actuador principal en movimientos coordinados de aleteo, barrido y plegado de las alas.
Resultados de las pruebas
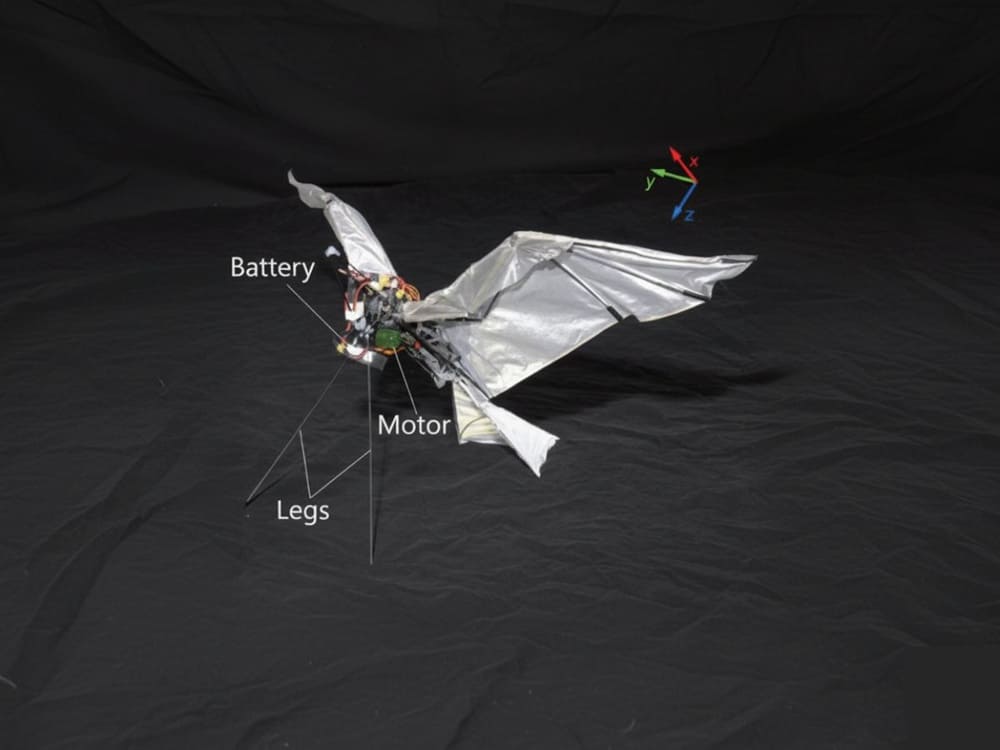
En los ensayos, el RoboFalcon2.0 logró despegar inclinándose hacia adelante, batiendo las alas rápidamente para generar sustentación y luego pasar a un vuelo hacia adelante. Aunque el robot sobresale en maniobras de baja velocidad, presenta problemas de estabilidad de cabeceo a altas velocidades por la ausencia de un estabilizador de cola, una limitación que se busca corregir en futuras versiones.
Características y aplicaciones
El robot tiene un peso de 800 gramos y una envergadura alar de 1,2 metros, dimensiones comparables a las de un ave de tamaño medio. Sus desarrolladores consideran que podría aplicarse en tareas de vigilancia de fauna salvaje y documentación científica, ya que su apariencia y forma de vuelo resultan menos intrusivas para los animales en su entorno natural.
Con el RoboFalcon2.0, la robótica bioinspirada da un paso más hacia sistemas capaces de imitar con precisión la complejidad del vuelo natural.
Vía: NotebookCheck










